Graham and Lin Dean, from the Friends of Heysham Heritage Centre, receiving a “new” PC from us. This machine will replace a knackered old laptop that they, and the other volunteers, were using, that was no longer fit for purpose.
We refurbish computers, mainly laptops, and pass them onto schools, refugees and other local community groups.
For a while now, I have been trying to make a dry box for storing 3D printer filament, having had problems with a reel of ASA filament becoming damp and the prints made from it coming out pitted and fragile. The first idea I tried was to use silica crystal cat litter as a dessicant in a sealed box. I bought a transparent storage box with a rubber seal and a packet of silica cat litter, as well as a cheap digital hygrometer / thermometer. Then I burned some holes in the lid of a plastic fast food tray with a heated skewer, and put the cat litter in the tray. Finally I put the tray, the hygrometer and the filament into the storage box and sealed the lid.
I left the cat litter in the box for a full day, and the humidity reading actually increased slightly from 55% Relative Humidity (RH) to 59% RH. This was at a nearly constant temperature varying from 24 °C to 23.7°C. The increase was within the error range of the meter but not the significant drop I had been hoping for.
The next thing I tried was to crush the crystals using the somewhat crude method of wrapping them in a strong piece of cloth and bashing them with the end of a brick, to see if this would increase the surface area of the crystals and make them absorb water better. This didn’t work so well as silica crystals are quite hard, and it also didn’t make them any better at drying the air in the box.
I suspect that the reason the cat litter didn’t work is that even though silica does absorb water, the granules you get in the sachets that come with electronic devices are prepared in a way that makes them highly porous and able to absorb atmospheric moisture, whereas the silica that is used as cat litter is designed to absorb liquid water so they make it out of solid crystals.
At this point I did a bit of research online and found this web page about drying mushrooms. It has a pretty good summary of the three main substances used as dessicants, how effective they are, and how to use them. In order of increasing effectiveness, they are silica gel, which will bring the humidity down to about 40% RH, calcium chloride, which is what is found in home dehumidifiers and can bring the humidity down to below 25% RH, and calcium sulphate, which is the strongest of the three and according to that page can lower the humidity to a few percent RH.
As it says on that page, calcium sulphate is the same chemical substance as plaster of Paris. This is a substance which attracts water strongly into its crystal structure, and can come in several forms depending on how much water it has absorbed: hydrated (fully saturated with water), hemi-hydrated (partly saturated), and anhydrated (no water at all). Plaster of Paris is the hemi-hydrated form and can be bought quite cheaply from craft shops.
The simplest way to make powdered plaster of Paris into a dessicant would be just to heat it in an oven to drive the water out of it, let it cool in a sealed heatproof container, and then put it into the dry box. This would probably work okay, but it would have the problem that air wouldn’t be able to percolate through the powder easily so it might take a long time to dry the air in the box.
I decided instead to try to make it into granules, thinking that they might absorb the water vapour better. The rest of this post describes how I did this.
Some of the equipment I used to make the granules.
The photo above shows some of the equipment I used to make the granules – two non stick baking trays, a bag of plaster of Paris, a mixing bowl and metal spoon, and a kitchen weighing scale. I also ended up using a couple of large glass jars, some rubber gloves, two plastic bags, a piece of heavy cloth about 40 cm square, some string, a pint glass of water, and a brick.
The first thing to do was to measure out enough plaster to fill the baking trays in a thin layer. You may want to wear rubber gloves for this as plaster is slightly irritant. I did this by just spreading it out in the trays to what looked like a reasonable depth to be able to break it easily once it had set.
Then I put the mixing bowl on the scales, zeroed them, poured the plaster into the bowl and wrote down the weight – 442 g.
Weighing the plaster of Paris
You make up plaster by mixing it with water in a ratio of 100 : 69 by weight. This makes 305 g of water, which makes a total of 747 g in the bowl. I then made a bit of a hole in the middle of the plaster and poured water in until the weight was (about) 747 g. Then I mixed it with the spoon until it was smooth, and poured it into the two trays in roughly equal amounts.
Liquid plaster in baking trays
I then allowed this to dry for a while (the instructions on the plaster say 6 – 10 minutes). The next thing was to take the plaster out of the trays and break it into granules.
To do this, I first put the trays inside a large plastic bag and turned out the sheets of plaster. These came out quite easily.
Turning the plaster out of the trays
Having done that, I then put the bag inside another bag, broke up the plaster sheets a little bit by hand and then wrapped the bags inside the cloth square with a piece of string.
Plaster fragments inside bags
Plaster and bags wrapped in cloth
The next thing was to bash the bag with the end of a brick until it seemed like the plaster sheets were all broken up. Then I took the newly broken granules out of the bag, laid them out in the baking trays, and baked them in the oven at 230°C for two hours.
Plaster granules ready for baking
I left the trays on the hob for a couple of minutes to cool down a little, then poured the granules into the large glass jars to cool properly.
Plaster granules cooling in jar
Once they were cool, I put them into the plastic tray with the holes in the lid and sealed this in the storage box with the hygrometer reading visible through the plastic sides.
Plaster granules, hygrometer and filament spools inside the dry box
The box sealed with the hygrometer reading showing
Finally it was time to see if the granules were going to work. I wrote down the time and relative humidity for the next few hours, and watched the humidity fall from 62 % RH at 16:42 to 27 % RH at 23:04. It fell quite fast at first, going down to 38% by 18:03, and then slower after that. Whether it will get all the way down to the level of a few percent that the web page I referred to above says you can acheive using calcium sulphate, I’m not sure yet, but I’m pretty pleased with this result, as it is below the level that is supposed to be acheivable using silica gel.
One test I would like to do is to open the box again in a day or two, let the air mix, and then see if the humidity drops as fast the second time, to get an idea of how much drying capacity this amount of dessicant has. If I get around to this I’ll post an update in a comment.
Blast gates for controlling air flow are not a new thing but buying them off the shelf can be an expensive shopping experience, plus they’re only available in fixed sizes. I’m using 110mm UK drain pipe which there certainly isn’t a suitable gate for.
Clearly any self respecting woodworker has the skills to be able to build their own. I took some inspiration from Jay Bates and Marius Hornberger both of whom have brilliant YouTube channels that you should subscribe to.
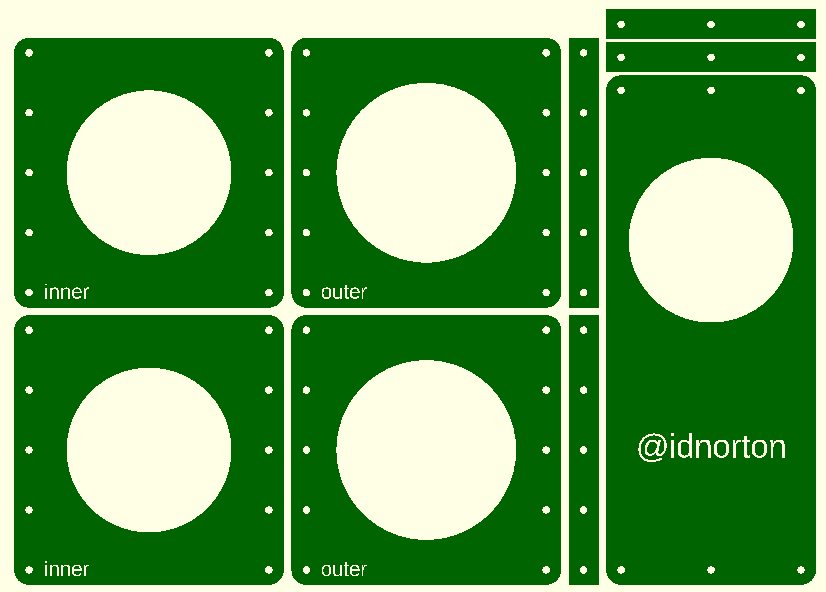
But this is a hackspace blog post, so clearly that’d be a bit too straight forward… how about if we laser cut them?
That’s heading more in the right direction. That’s a pretty nice design as a starting point. I ended up having to tweak the design to account for a slightly different diameter pipe fitting (mainly because I forgot to measure it before going to the hackspace and guessed wrong). But neat trick if you happen to do this, cut another one the right size and then when it’s finished very carefully lift it out of the cutter without moving the board you cut it out of, now drop your badly sized one in the hole and re-cut. Obviously that only works if it’s too small, or you have a magic laser that glues bits back on… no, wait, that’s a 3d printer.
1 x FloPlast SP124 Single Pipe Coupler Black 110mm http://www.screwfix.com/p/floplast-sp124-single-pipe-coupler-black-110mm/62966
You’ll obviously need a laser cutter, we always recommend those awesome guys at Just Add Sharks because they rock!
Assembly notes:
The shorter bolts fix the handles to the gate
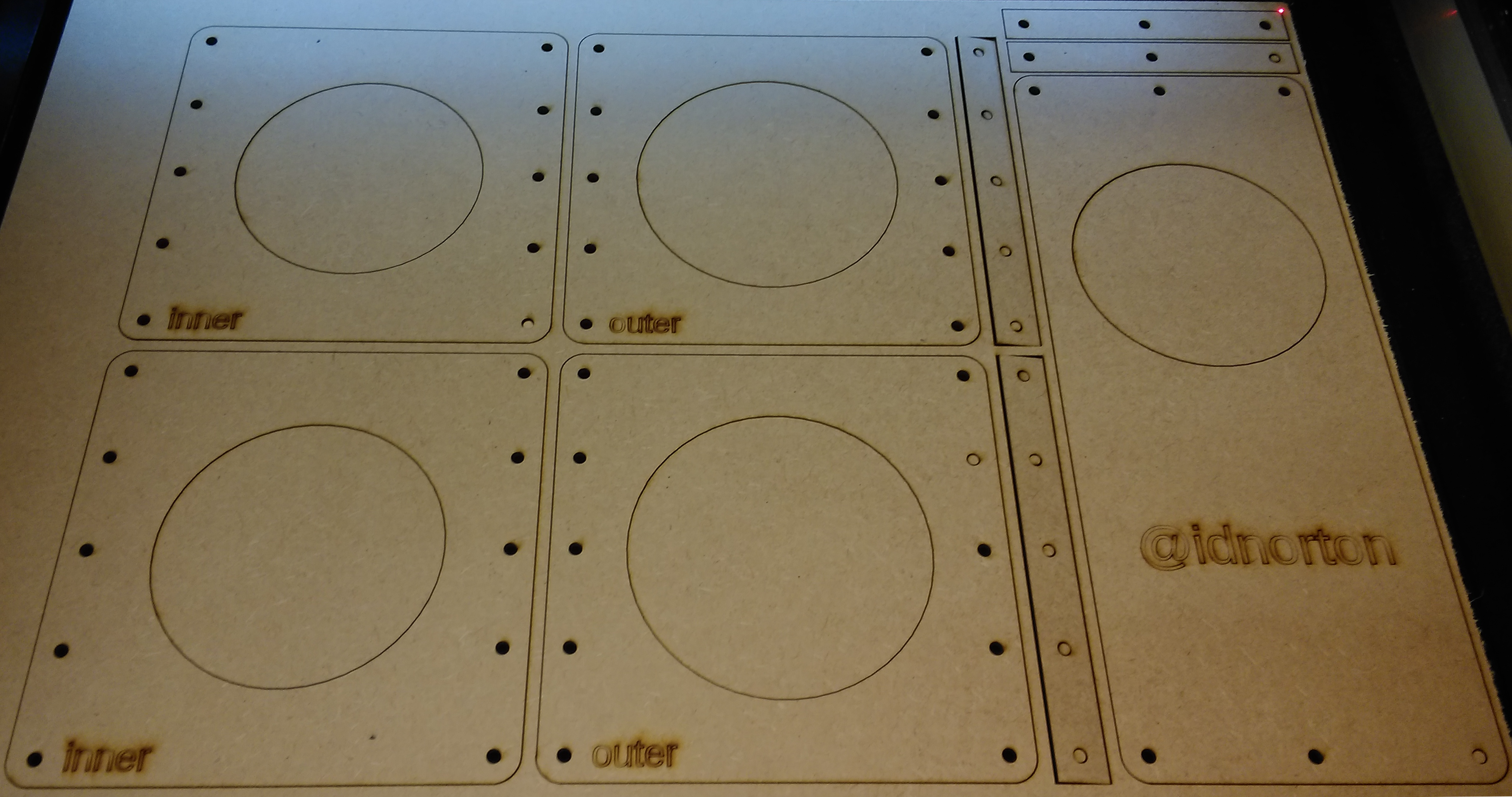
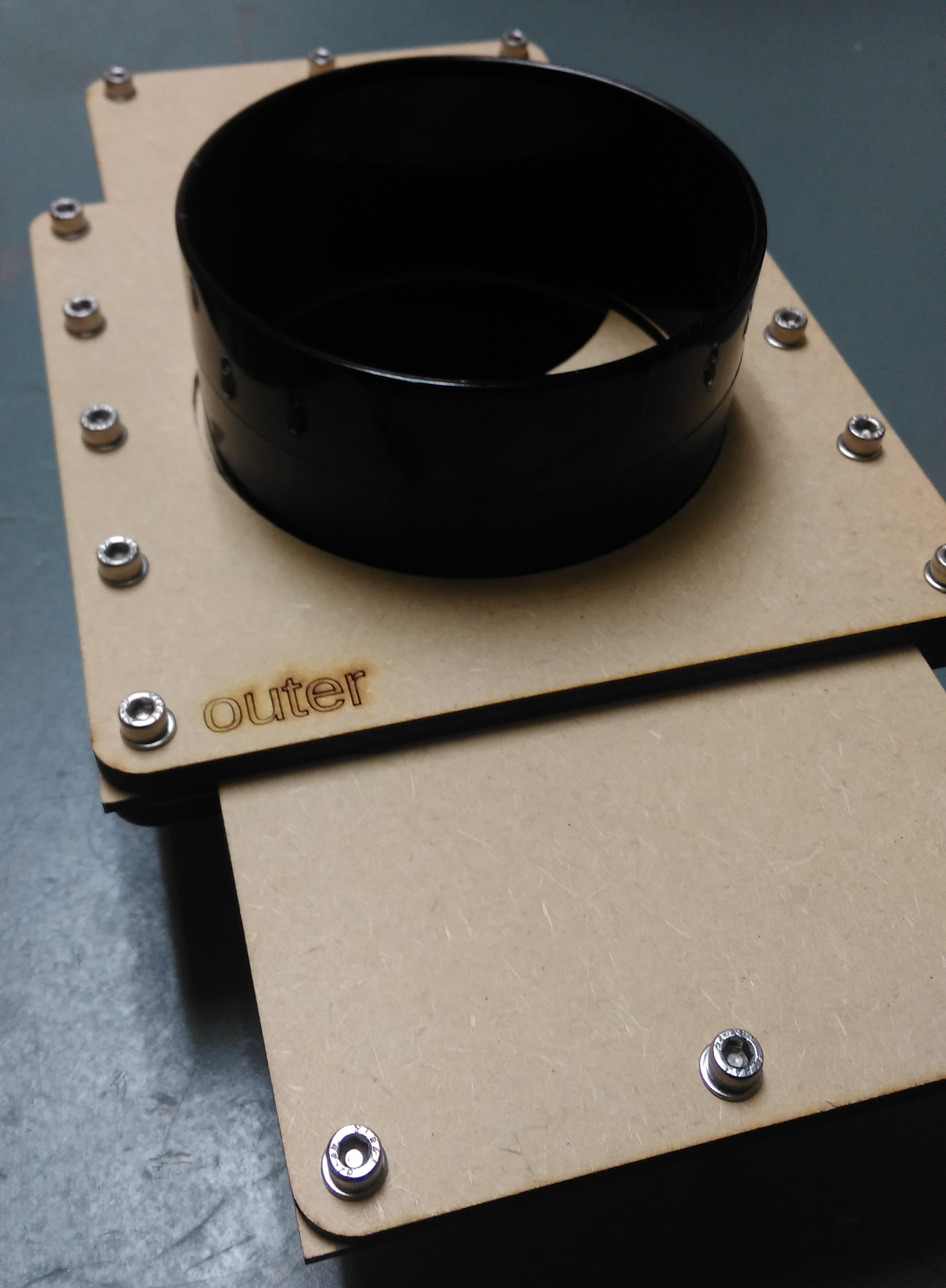
Squares with the larger hole go on the outside
The tricky bit is putting all your gate bolts in, adding the side strips, adding a washer and then adding your second set of gate pieces
This is important, don’t over tighten this or your gate won’t side. I recommend the use of a cordless drill with torque setting that you can wind right down to low. As long as you can’t rotate them by hand, they are tight enough.
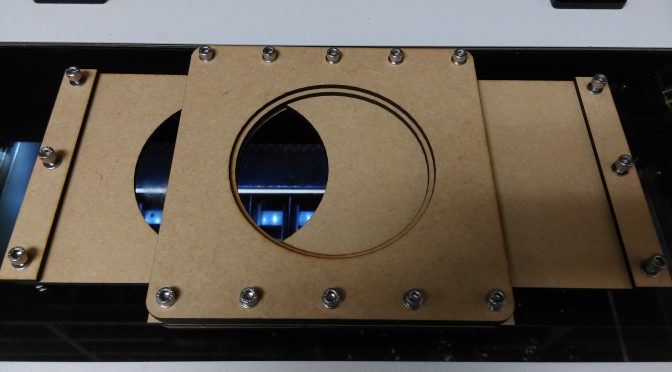
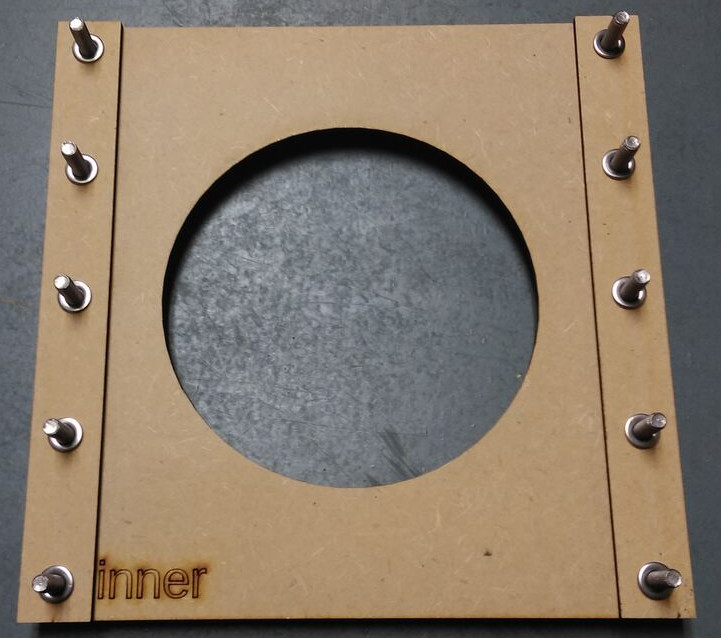
Having assembled your gates, you should have something that looks like the header picture above. Now we need to cut the pipe fitting in half and attach it to the gate. Safely cutting the plastic coupler in half without a big enough lathe is a hard thing to achieve, so having had a think about how to do this I came up with something that will undoubtedly make some people twitch like crazy:
That’s a Dremel speedclic plastic cutting wheel on an arbor, in a pin vice, in a pillar drill, yes. I did warn you. A safer way to achieve this would be to use a lathe if you have one big enough (the pipe couplng for this goes around the chuck of my small lathe). This technique gives accuracy whilst being the safest I could think of with the equipment at hand.
I cut mine to have the tabs on the end with the seal as that’s the one I plan to stick an extraction hose end into.
Once the coupling is cut, glue it in place on either side of the gate. I used Screwfix’s Pink Grip which hasn’t quite set right now but looks like it’s going to do the right thing.
So there we have it, Mark 1 blast gate. Stay tuned for Mark 2 which has electronics to control your extractor.
We recently decided that we needed a new 3D printer for the space, given that one of the members who had been kindly lending us their printer (thanks Vic Harkness) has moved away, and the other main printer we have, which is also lent by a member, is currently not working. We’ve had several people joining recently because they wanted to do 3D printing, so we decided it was important to have a printer that was owned by the space, which we could maintain collectively. We settled on a kit of the Prusa i3 printer from prusa3d.com (see image, which is copied from their site).
The box arrived just in time for our Wednesday open meeting last week, and was eagerly unpacked. As several other blog posts I’ve read have said, it was immediately obvious that a lot of care had gone into the design and also the packing of this kit. The outer box was pretty substantial and all the parts were well organised and neatly packed inside smaller boxes. The 3D printed parts and smaller fixings were put in plastic bags labelled by the assembly they belonged to, which makes it easy to work through the assembly manual and know that you have all the parts for the current step to hand. There were even screen printed labels on the motors to say which axis they belonged to.
Starting unpacking
Due to peoples’ time commitments, we had to wait until Monday morning to make a start on building the printer. The building was done by Gustavo Carreno and Andrew Baxter.
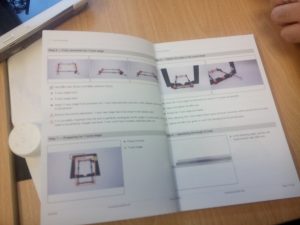
The assembly manual was pretty clear and helpful, with colour coded photos of the tools needed and the 3D printed parts used in each step. The online version is also useful if you can’t make out the details in some of the pictures.
The assembly manual
The main thing to say about the build process, apart from a few small points I’ll make later, is that it’s pretty much just a question of preparing yourself for a number of hours of careful assembly work, following the instructions step by step. (We did it over 3 days, but two of them were half days. Some people have done it in an afternoon, but expect to take longer if you’ve not built a printer before). None of the steps are that difficult in themselves – you just need to keep paying attention to what you’re doing. I would suggest that it might be worth at least skim-reading through the instructions for each stage of the assembly before you work though and build that stage, just to get an idea of where you’re going with it. However we mostly just worked through in order and didn’t have any real problems.
Gus working on the Y-carriage
One thing that we did a bit differently from the manual, which I think is worth passing on, was to do with aligning the y-axis stage. If you look at the assembly manual, on page 6 of the version I have, under ‘Step 6 – Fully assemble the Y-axis stage’, it points out that it’s important to get the axis perfectly rectangular at this point, or you’ll have trouble calibrating later. One thing here is that it’s probably better to get a reasonable alignment here, but wait until a few steps further on before you really try to get it precise. This is because in the following steps you will be fitting the stage to the main frame, and also to the smooth rods that carry the Y-carriage, so some of the dimensions may need to be changed.
Another thing is that the automatic calibration process is actually pretty good, at least at aligning the X and Y axes, so the kit should be reasonably forgiving of small alignment errors. In other words don’t do what we did and spend a whole morning trying to get the Y-stage perfectly aligned, only to discover that (a) as I’ve said above we then needed to change things again, and (b) the automatic calibration takes out most small errors anyway!
You might also like to try the following trick for getting the frame rectangular and level. Do this after you’ve fitted the length of the carriage to the 8mm smooth rods, as in step 10, but skip step 9 (‘tighten the sides to the y-axis stage’) for now. In other words, at this point you should have fully assembled the Y-axis stage, and adjusted the length of it to the smooth rods.
Aligning the Y-axis stage
What we did next was to start by loosening all the M8 nuts on the Y-axis stage, so that it could adjust in width (but not length) to fit the main frame. Next we slid the front end of the stage into the slots in the frame, setting the width. Then, which is what is different from in the manual, we moved two of the loose M10 nuts which will eventually hold the frame in its final position all the way down the threaded rod until they could be used to clamp onto the frame, and used a spanner to tighten them, as shown in the picture above. The idea was that with the M8 nuts still loose, this would force the two M10 rods to be close to perpendicular with the frame and thus make the stage rectangular. Then at this point we carefully tightened all the M8 nuts.
Finally we took the Y-axis stage out of the frame and used a ruler to check all of the widthways and lengthways dimensions at each end, and made final adjustments as appropriate. Whether this is better than what the manual suggests, I’m not sure, but we did okay when it came to running the automatic calibration.
Gus admiring the completed Y-axis
The X and Z axis assemblies were pretty straightforward – as I said above just a case of working through the instructions carefully. Tightening the X (and Y) axis belts was a little bit tricky – the knack seems to be to make a loop of about the right length held in a pair of pliers, then keep trying it against the belt holder and if it’s too loose, keep moving it tighter one tooth at a time and trying it again.
Andy working on the extruder assembly
Don’t do what we did and forget you can slide the whole X-axis down along the Z-axis to get to the back of the X-carriage and work on the belt. You might also like to pause at this point and admire the skull-like appearance of the back of the X-carriage!
Yes the X Carriage really does look like a skull from behind
The extruder was also pretty straightforward to assemble. Managing all the cables going from the extruder to the electronics was tricky, but we did all right following the instructions step by step. Using a piece of 3mm filament to stiffen the cable bundle is a neat trick.
Gus working on the cable management
After the extruder, it was time for the LCD assembly. The main thing here was to be careful not to crack the circuit board of the LCD while getting it into the plastic frame.
LCD assembly completed
Next was the power supply and heated bed.
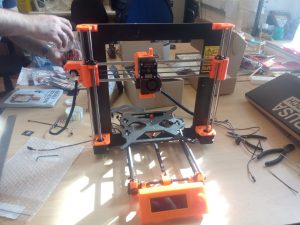
With the power supply and heated bed assembled
Finally, it was time to wire it all up – the electronics assembly. One difficulty here was that because all the parts on the electronics housing are black, it was hard to make out what is what in the printed photos. The online manual is useful here. Getting all the cables to the right place needs a bit of care, as many of them take the same fittings. However if you just follow the manual and double check each stage of the assembly you should be okay.
Gus wiring up the electronics
Finally, after 3 days work, on and off, we had a fully assembled printer. At this point, we had to break while I (Andy) went to an un-missable appointment and had lunch. Gus chivalrously waited for me to get back before we did the grand turn on.
Somewhat to our surprise (mine anyway), it passed all its tests first time. The calibration took a while but went all right (although the first time we did it, the printer seemed to lose the settings when we turned it off and we had to re-calibrate). It was interesting to see how it first scanned roughly around the points where the calibration markers were, and then homed in on them more precisely.
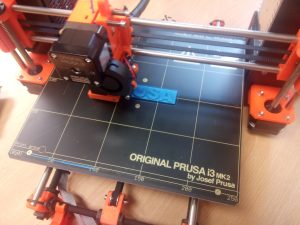
Then it was time to do the first print. There are several prints on the SD card that comes with the printer – we chose the Prusa logo, which came out nicely.
Printing out the Prusa logo.
I don’t want to spend too much time on a review of how the printer works – this post is meant more as a guide to the build process rather than a review. Maybe one of us can do a review of the printer when we have a bit more experience using it. However, my first impressions are very positive. The prints are as good as or better than the Lulzbot TAZ we were using before, the calibration system is very neat indeed, and the LCD controls are easy to operate.
In summary, I’d say that this is a well designed and neatly packaged kit which anyone with a reasonable level of mechanical aptitude should be able to put together over a couple of days without too much trouble.
Shout out to Malc Crook (https://hackaday.io/mal8837) and Adam (https://hackaday.io/Bobbsta10) who both contacted me to say that the PIR linked to in the original post is no longer the one you get when you order the same item from the same seller 🙁
Fear not, for I have hacked the new one this evening and it’s pretty straight forward 🙂
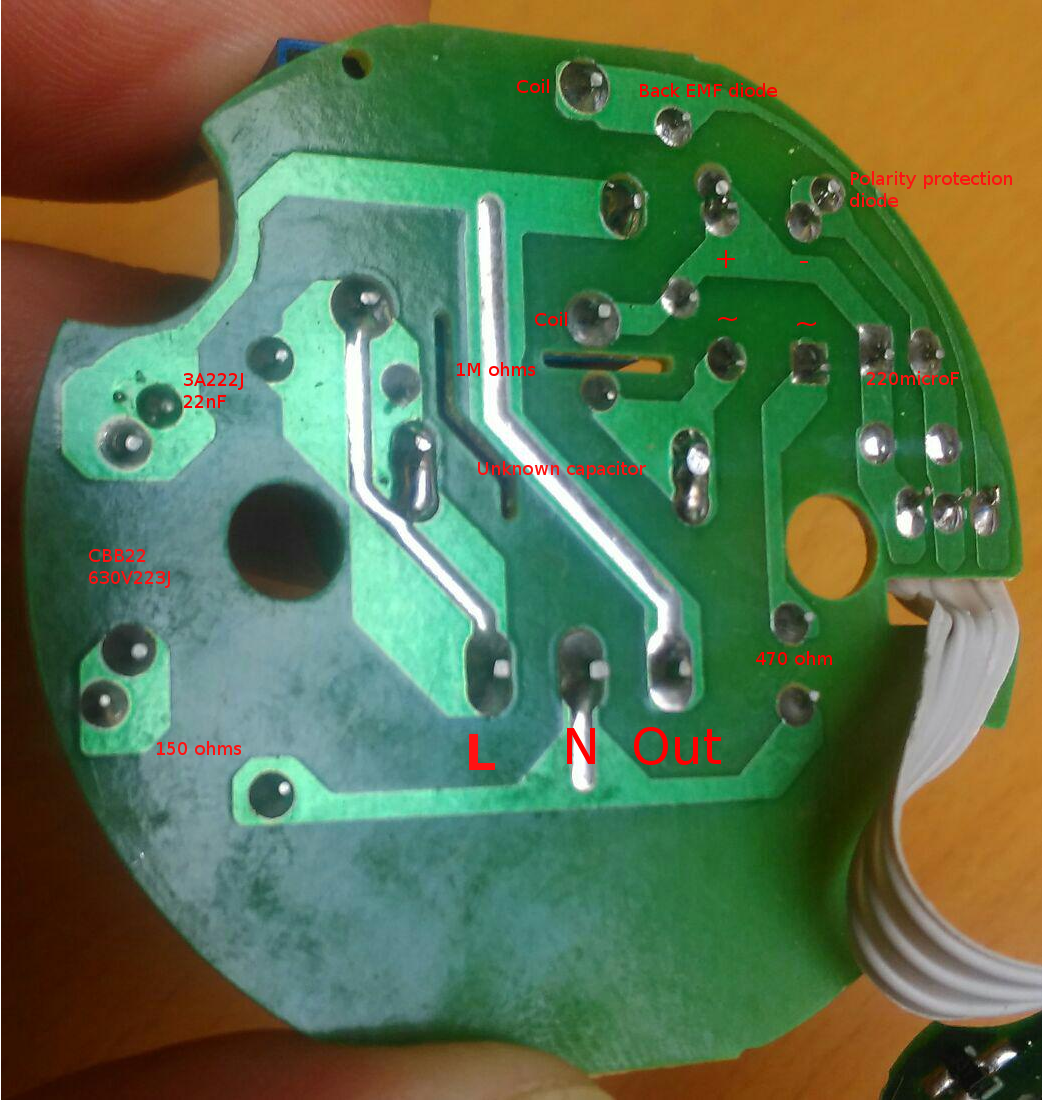
Well that mostly looks similar…
Still looks similar…
Well that’s different. The two boards are fixed together and the front board has to come away from the plastic shafts for altering the time and lux level
Those are really annoying to get back in but I’ll come back to that.
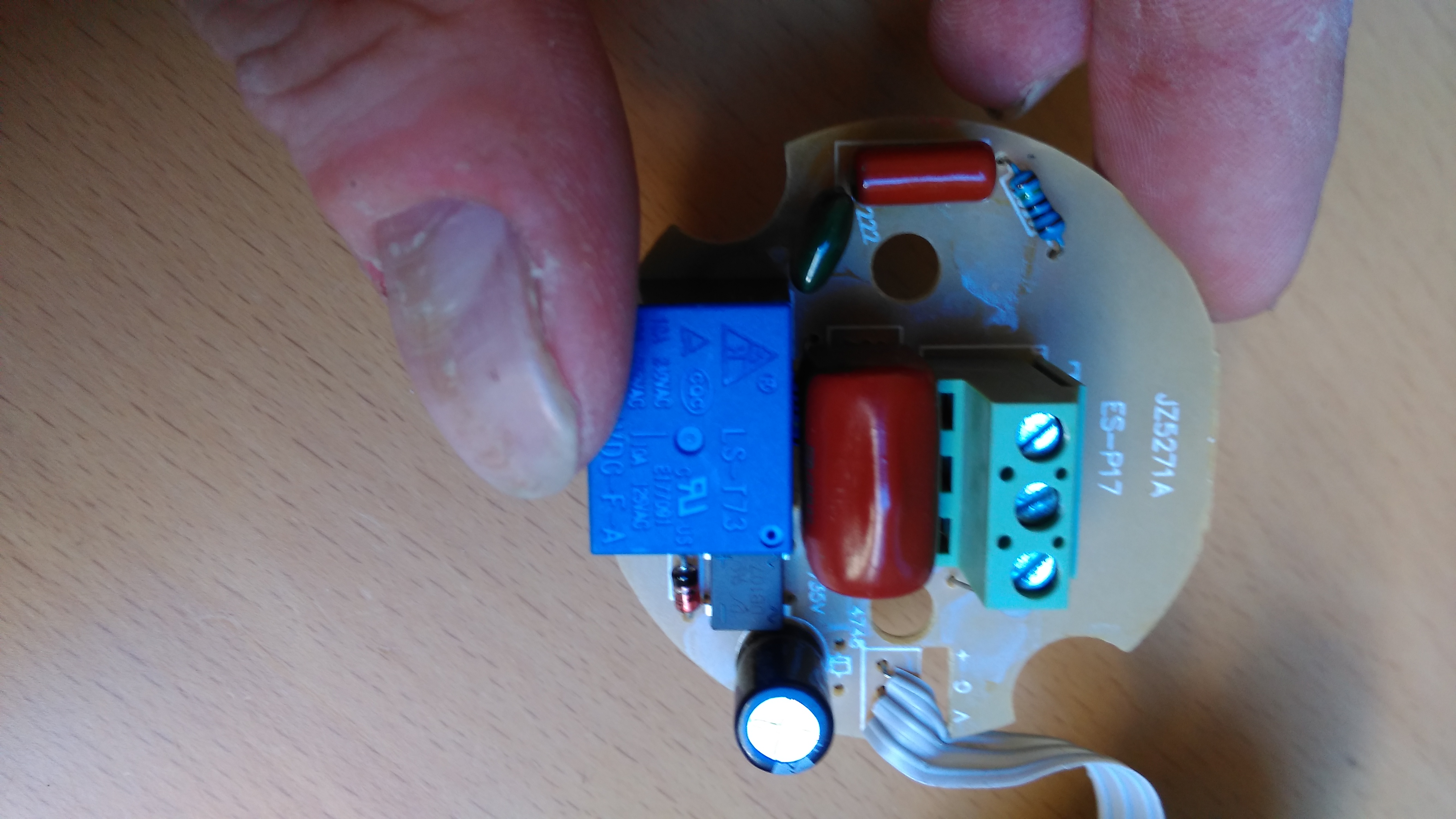
Different AC supply board this time around. Let’s take a look see what’s going on..
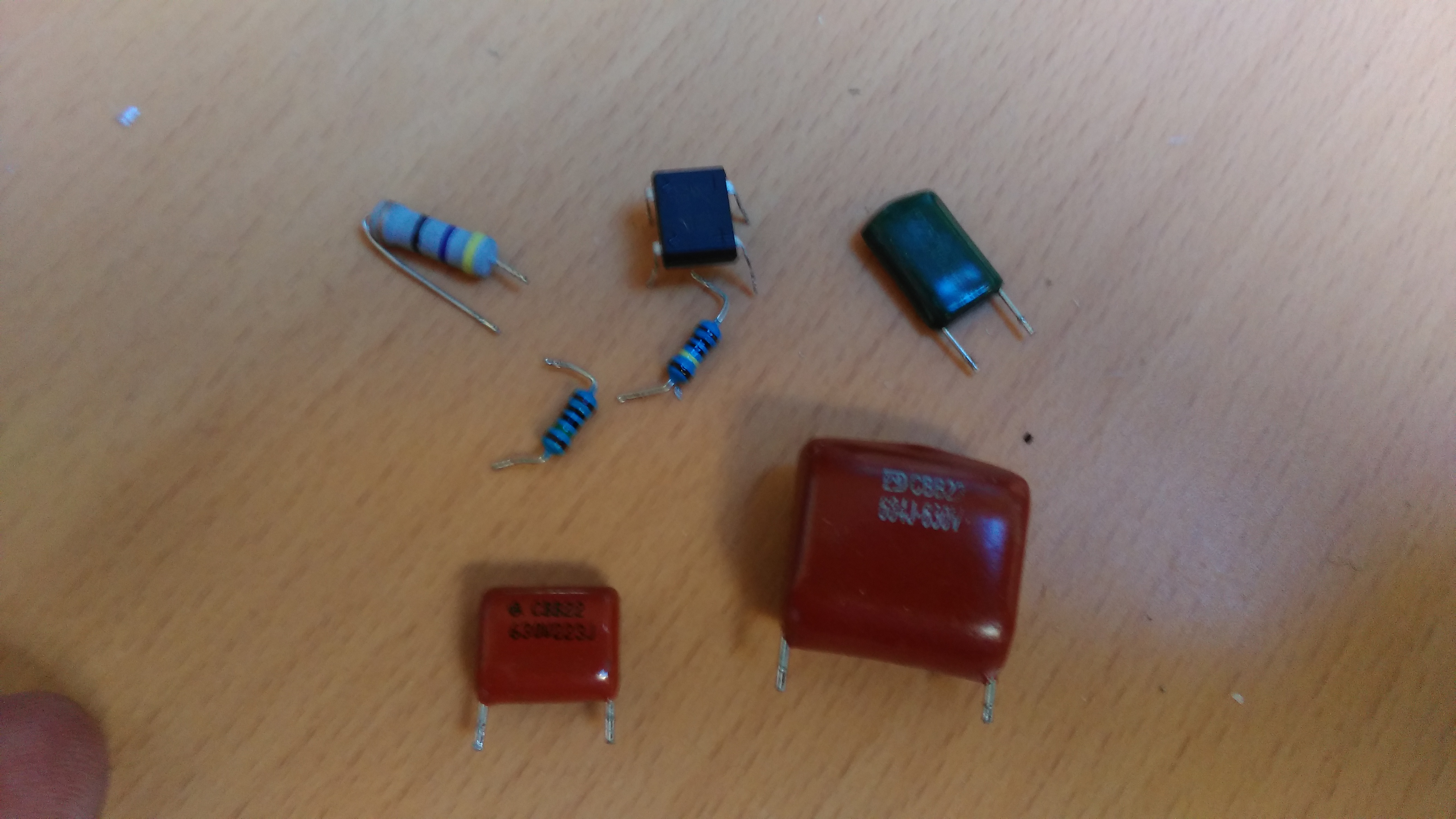
So capacative dropper is driving an actual bridge rectifier this time rather than four discrete diodes. Seems like there’s a lot here we don’t need….
I always end up with spare bits when I take things apart….
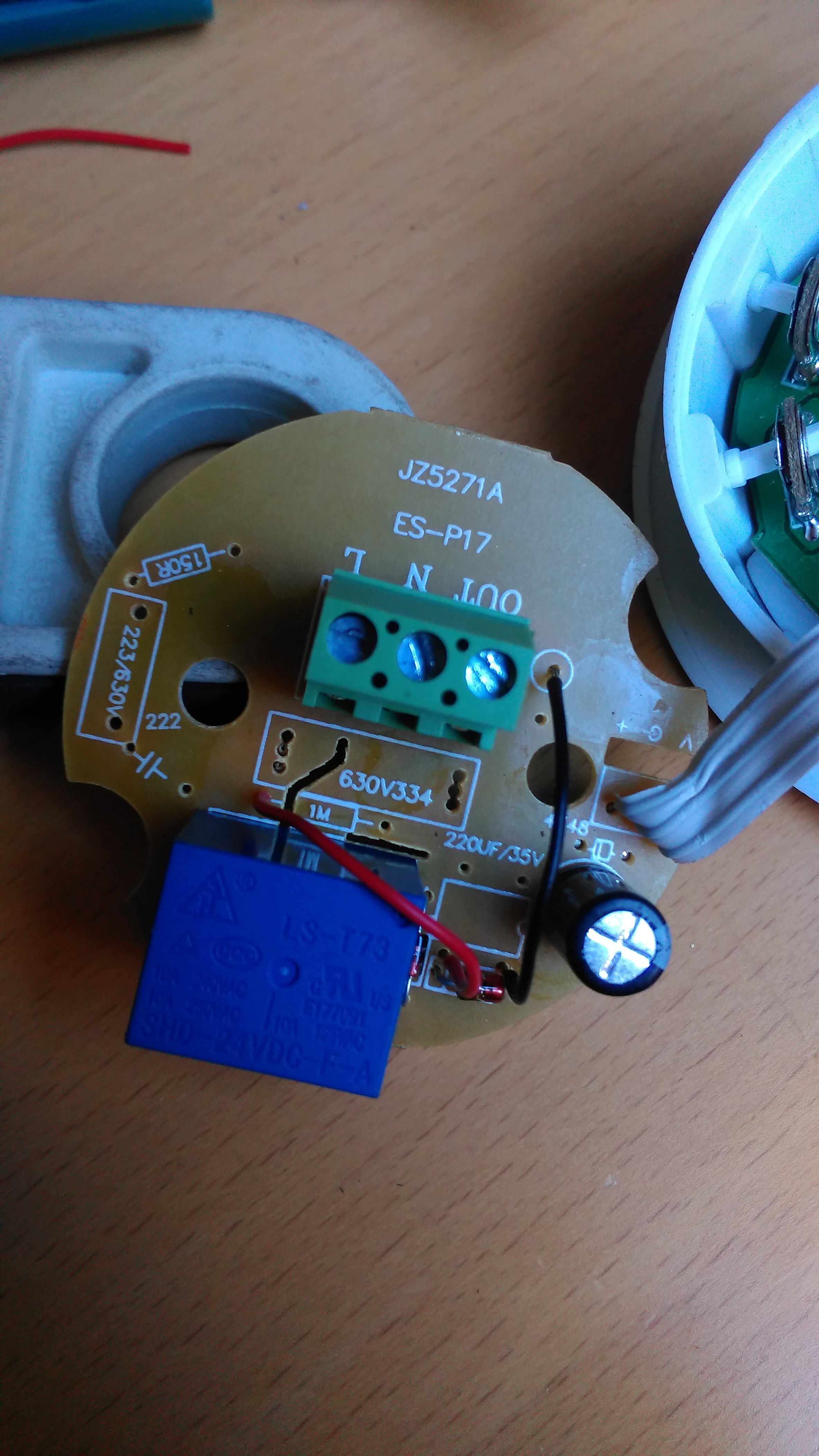
Right, so now we look like:
So having removed all but the diodes for protection and the capacitor for smoothing the supply, we’re left with +24v going in and a working automation PIR! I put the front board in place without screwing it in and put the spacers on the back board as it came but without the screws. We’re no longer dealing with mains voltage and the spacers keep everything sensibly… well… spaced… Best update the labelling…
That’s a bit neater than the previous scribblings with a sharpie… 🙂
I’m hoping that step by step pictures and the diagram will make it clear how this change works. The PIR module is 24v all along, all we did was remove the AC components and drive it directly.
There doesn’t seem to be an LED on this model. The relay is triggered by dropping the signal line from the front board to 0v. It floats at +24 otherwise so technically we could lose the relay completely and drive that back to an input. I’ve not tested that so your mileage may vary.
Our Just Add SharksGreyfin laser cutter is an awesome piece of kit supplied by a UK based company who really love to engage with their customers – in short Dominic and Martin are awesome community players who love the hackspace movement as much as we do.
But what happens when you want functionality that your machine doesn’t provide? Perhaps you want people to log in and record the timings for billing purposes.
Those of you that know me will already know I have two young boys (and a third imminent), for those that don’t well, you do now. As a small, fun, afternoon project with some cardboard I recently built a castle with the eldest to replace the one that got wet that he built at school.
Which got me to thinking…
I have Inkscape. I have access to a Makerspace. It has a laser… to the drawing board.
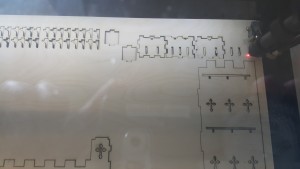
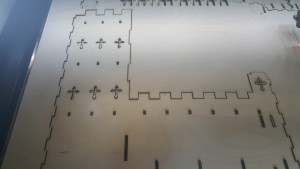
After about a week of real time passing (and about 8hrs playing in Inkscape) I had design version 2.0 of my castle (if we assume that the cardboard was version 1.0).
It’s not bad, it needs a few tweaks and stuff but it came out quite well. A few hours with a pot of glue and a Stanley Knife for minor corrections (mostly tight fighting pegs) and it was all done.
The kids love it, and you can all have a look at some of the pictures of it below.
Now, will I have time to do a version 3.0? I think it needs a redesign from the ground up to be bigger 🙂
A boy and his castle
I even built little supports for the battlements
It’s a ‘LAZ’R’
45 minutes to cut 3 sheets of A3
Towers and supports – roughly Lego Minifigure sizes
The Gatehouse could be modified to have a drawbridge as well as a portcullis